石田 岳志¶
職歴¶
CyberAgent AI Lab¶
2024年7月 -
Tier IV, Inc.¶
車両の自己位置推定の研究開発
Visual SLAM 技術の調査と実装
難しい環境を対象とした位置推定アルゴリズムの開発
2020年7月 - 2024年6月
未踏プロジェクト¶
Visual SLAMフレームワークの開発
2019年4月 - 2020年3月
株式会社ディー・エヌ・エー¶
コンピュータビジョンに関連する手法の調査と実装
2018年4月 - 2020年3月
アルバイト
クックパッド株式会社¶
料理画像から具材を推定する手法の開発
2016年12月 - 2017年7月
アルバイト
株式会社ウサギィ¶
コンピュータビジョンや自然言語処理におけるさまざまな手法の調査と実装
2014年5月 - 2017年1月
アルバイト
学歴¶
東京高専 専攻科 機械情報システム工学専攻
2017年4月 - 2019年3月
フィンランド メトロポリア応用科学大学 (交換留学)
2017年8月 - 2017年12月
東京高専 情報工学科
2012年4月 - 2017年3月
特許¶
料理に用いられている具材を料理画像から推定する手法
成果物¶
Visual Relocalization¶
COLMAP 地図と単眼カメラを活用した自己位置推定

icp_rust¶
ICP (Iterative Closest Point) の Rust による実装。
TIER IV で開発中の OS の上で動かすことを目的としているが、Linux でも動作する。
YDLiDAR Driver¶
手のひらサイズの小型な LiDAR である YDLiDAR T-mini Pro の Rust 製ドライバ。
LOAM (Refactored version)¶
Tadataka¶
Visual Odometry のアルゴリズムを複数実装したパッケージ。RGB-D カメラ向けのオドメトリ推定アルゴリズムと、特徴点ベースの単眼カメラ向けオドメトリ推定システムを使うことができる。
DVO (Dense Visual Odometry) [5] [2]
深度情報および画像の輝度情報からカメラの移動経路を推定できる。
特徴点ベースのVisual Odometry
単眼RGB画像列のみから3次元地図とカメラの軌跡を推定できる。
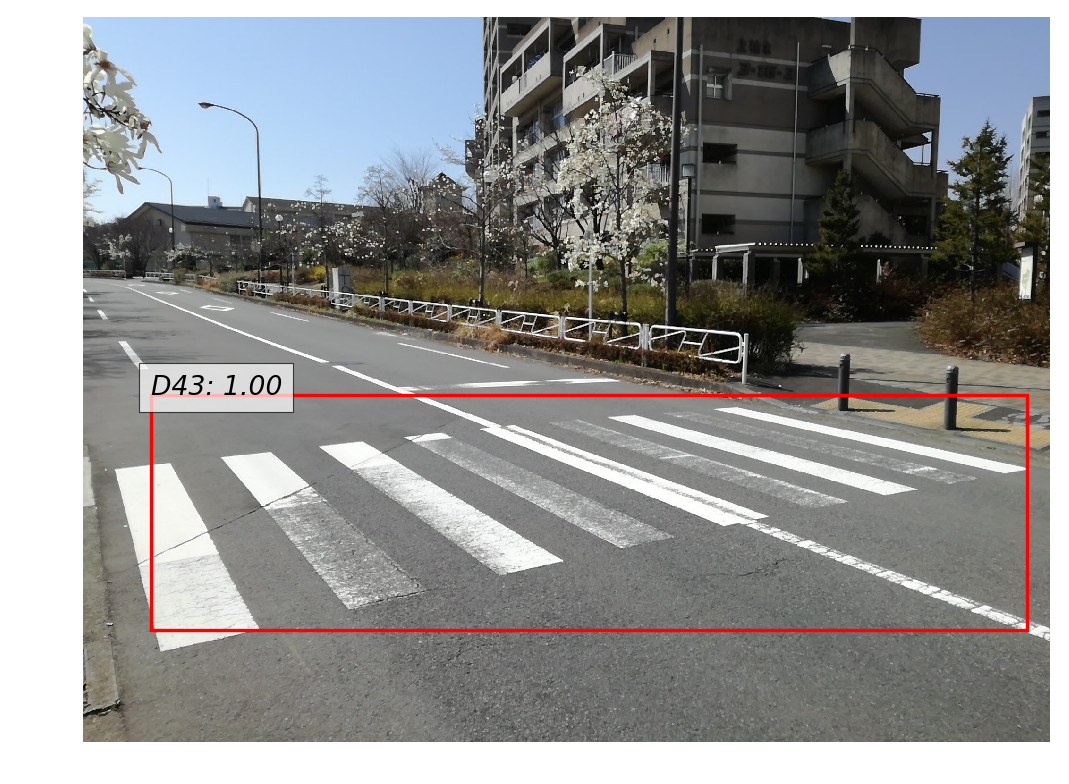
RoadDamageDetector¶
SBA¶
高効率な3次元復元アルゴリズム Sparse Bundle Adjustment (SBA) [4] を Python で実装した。
Tomasi-Kanade¶
Tomasi-Kanade法 [6] による3次元復元の実装。
正投影カメラモデルを用いるので、実世界のアプリケーションとしては利用範囲が限定されるものの、SVDによって高速に3次元復元を実行できる。
Bilinear-Interpolation-SIMD¶
画像の画素補間に用いられるアルゴリズム Bilinear Interpolation を SIMD を用いて実装した。
PCANet¶
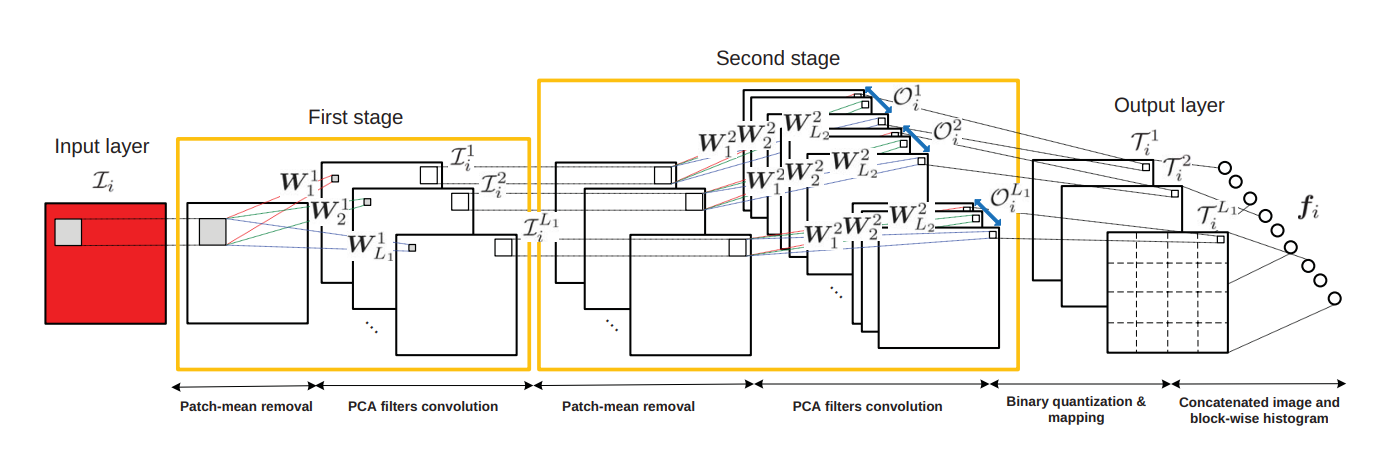
Ensemble PCANet¶
PCANet をアンサンブル学習することで分類器の性能向上を図った。また、これを研究成果として JSAI 2017 で発表した。
DTrie¶
簡潔データ構造 Trie のD言語による実装。
かな漢字変換で使う辞書を少ないメモリで保持するために実装した。
SCW¶
オンライン教師あり線形分類器 SCW (Soft Confidence-Weighted Learning) の実装 [10]。
Qiita¶
執筆¶
TIER IV Tech Blog 「Visual-Inertial Odometryが自動運転に与えるインパクトと応用への課題」
日本写真測量学会 写真測量とリモートセンシング 2023年11月号 「市街地における自動運転へのSLAMの活用」