Article¶
Journal of the Japan society of photogrammetry and remote sensing, November 2023, "Utilization of SLAM for Autonomous Driving in Urban Areas"
July 2024 -
R&D of vehicle localization
Development of a Visual SLAM framework
Design and implementation of machine learning methods for ingredient recognition from food images.
The model I proposed is granted as a patent #6306770.
Research and development of Machine Learinng & Computer Vision methods
Providing effective solutions to customers
My works are available on GitHub
This project aims to develop a Visual SLAM framework that is flexible and simple to use.
Currently implemented algorithms:
Estimating camera motion from RGB-D video sequence (YouTube video).
Estimating camera motion and 3D structure from a single RGB camera (YouTube video).
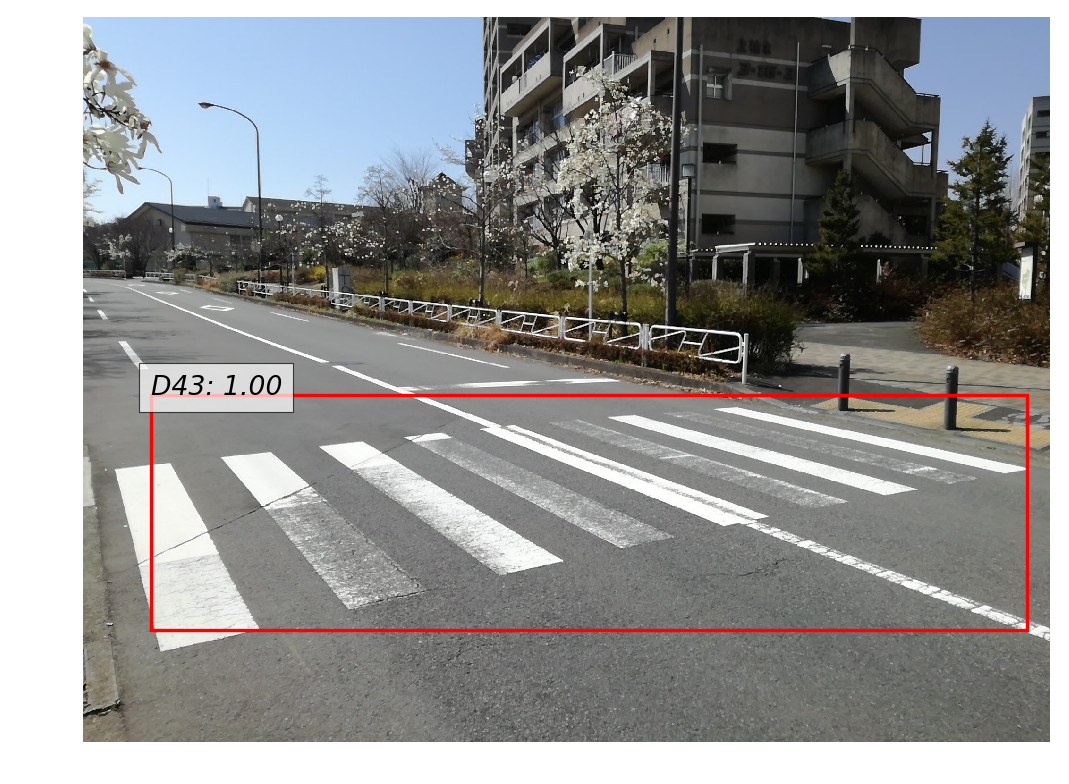
Trained SSD(VGG16) on the RoadDamageDataset provided by Maeda et al. (2018) [3]
Replaced VGG16 with ResNet-101 and evaluated the performance
Large margin training
Confidence weighting
Capability to handle non-separable data
Adaptive margin
Journal of the Japan society of photogrammetry and remote sensing, November 2023, "Utilization of SLAM for Autonomous Driving in Urban Areas"